
Stereo PIV Applied to a Vortex Ring Flow
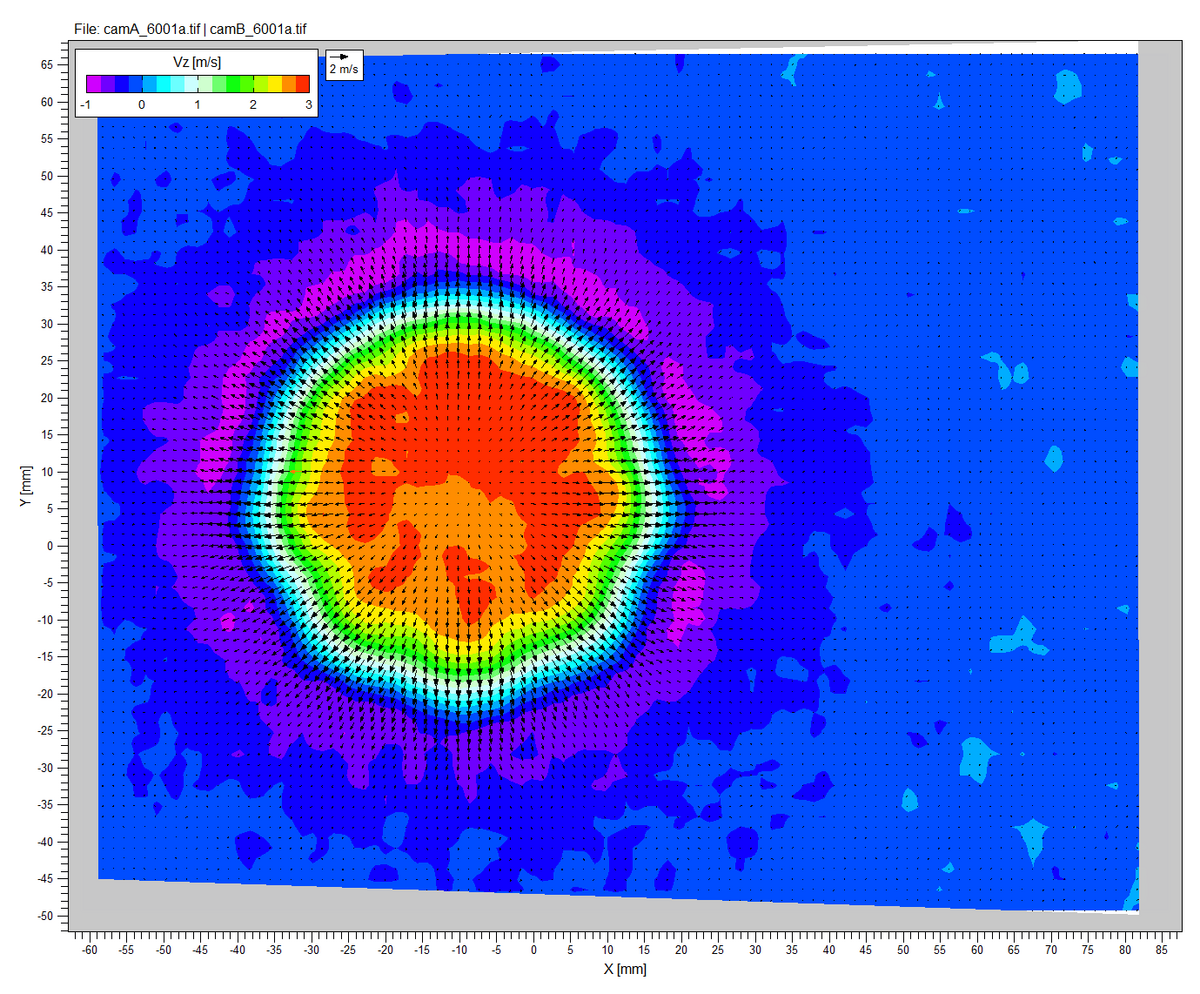
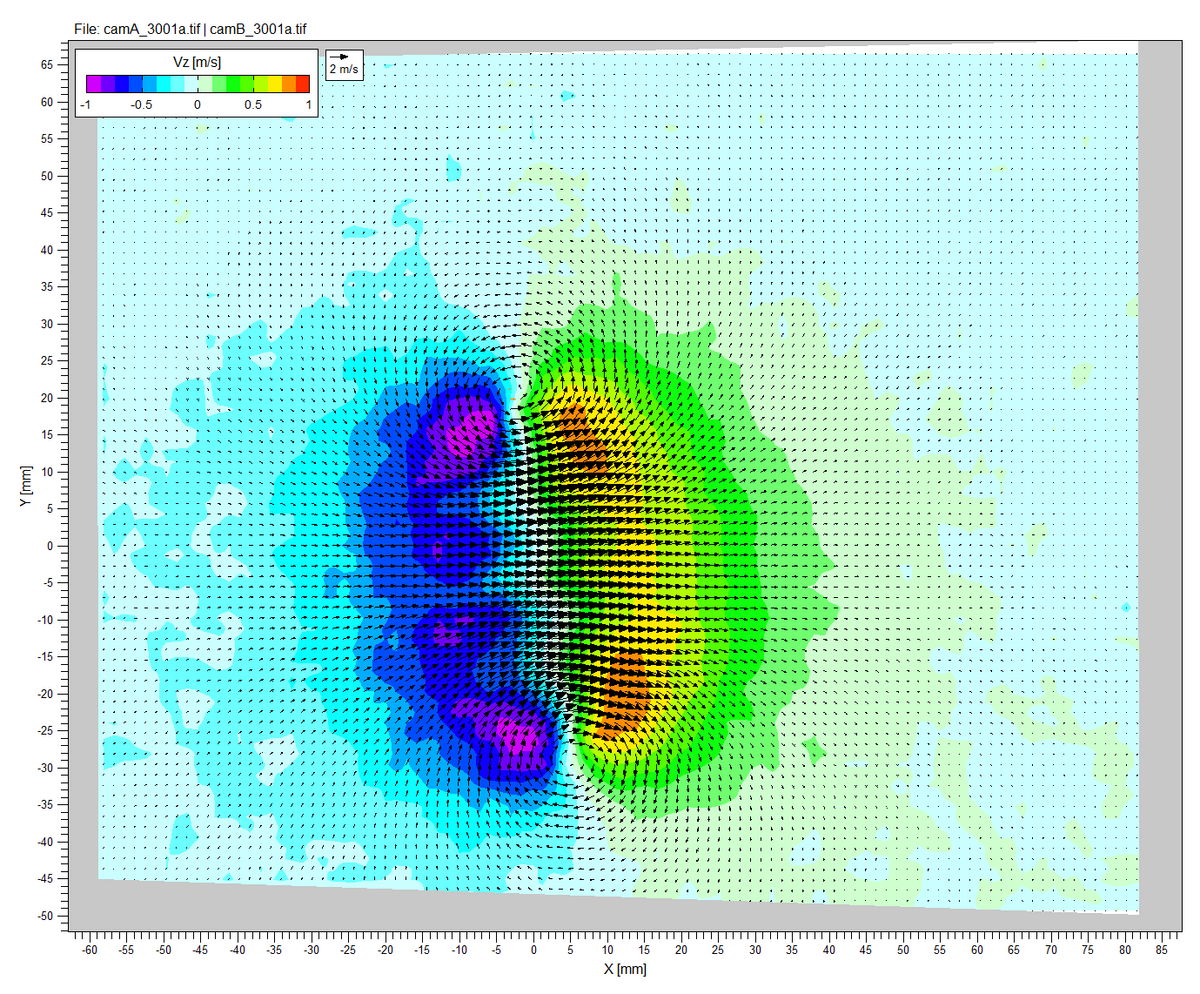
This data of a vortex ring in air passing through a light sheet was recorded in 1996 at the DLR Institute of Aerodynamics and Flow Technology using simple Scheimpflug mounts and first generation double-shutter PIV cameras with interline transfer CCD sensors. The data obtained in this measurement was subsequently published in [1] and is made available here.
The package consists of the following:
- calibration images for both camera views
- 12 sets of PIV recordings of different realizations of the measurement
- calibration point pairs for image reconstruction
- reconstructed velocity field as ASCII files
- Python scripts illustrating projective mapping and image back-projection
References
[1] Willert C (1997) Stereoscopic digital particle image velocimetry for application in wind tunnel flows. Meas. Sci. Technol. 8 1465 DOI 10.1088/0957-0233/8/12/010


Raw images
Sample recordings by both cameras exhibiting uneven illumination of 1um aerosol droplets between the pulses of the flash-lamped dual-oscillator Nd:YAG laser (JK Lasers, 70mJ/pulse). Due to uneven seeding conditions during formation of the vortex ring its cores can be discerned.
The original images (TIFF-format) can be downloaded through the link given below.
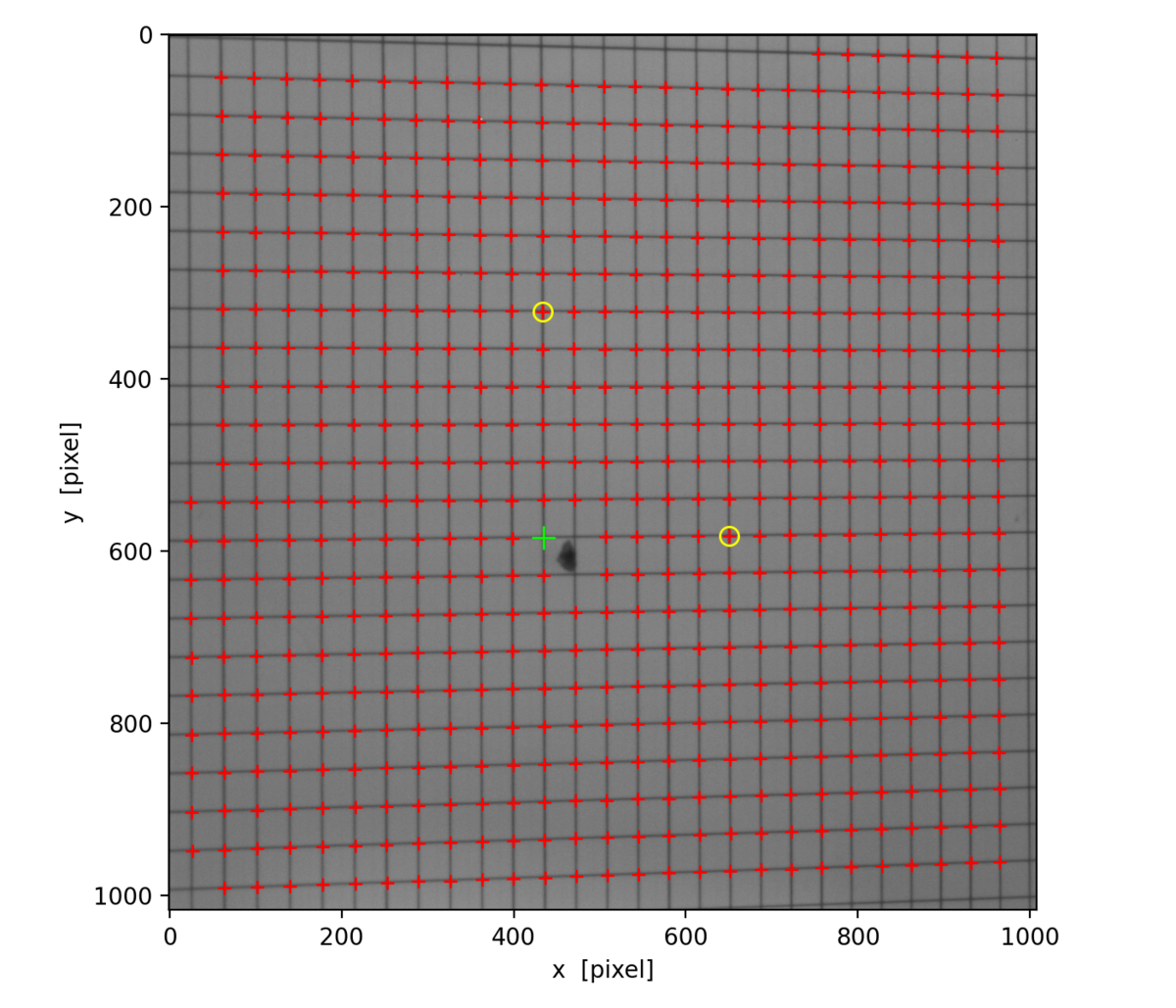
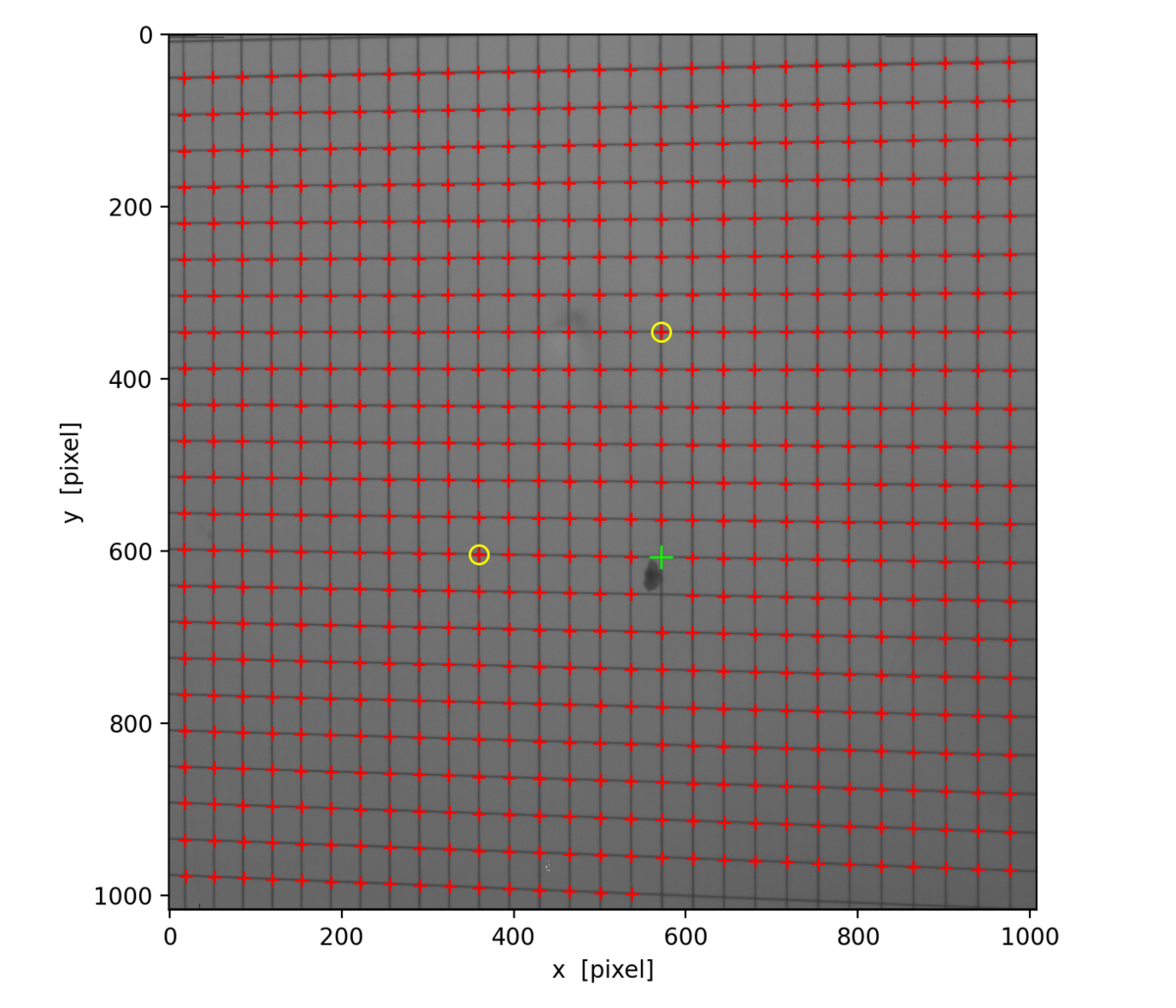
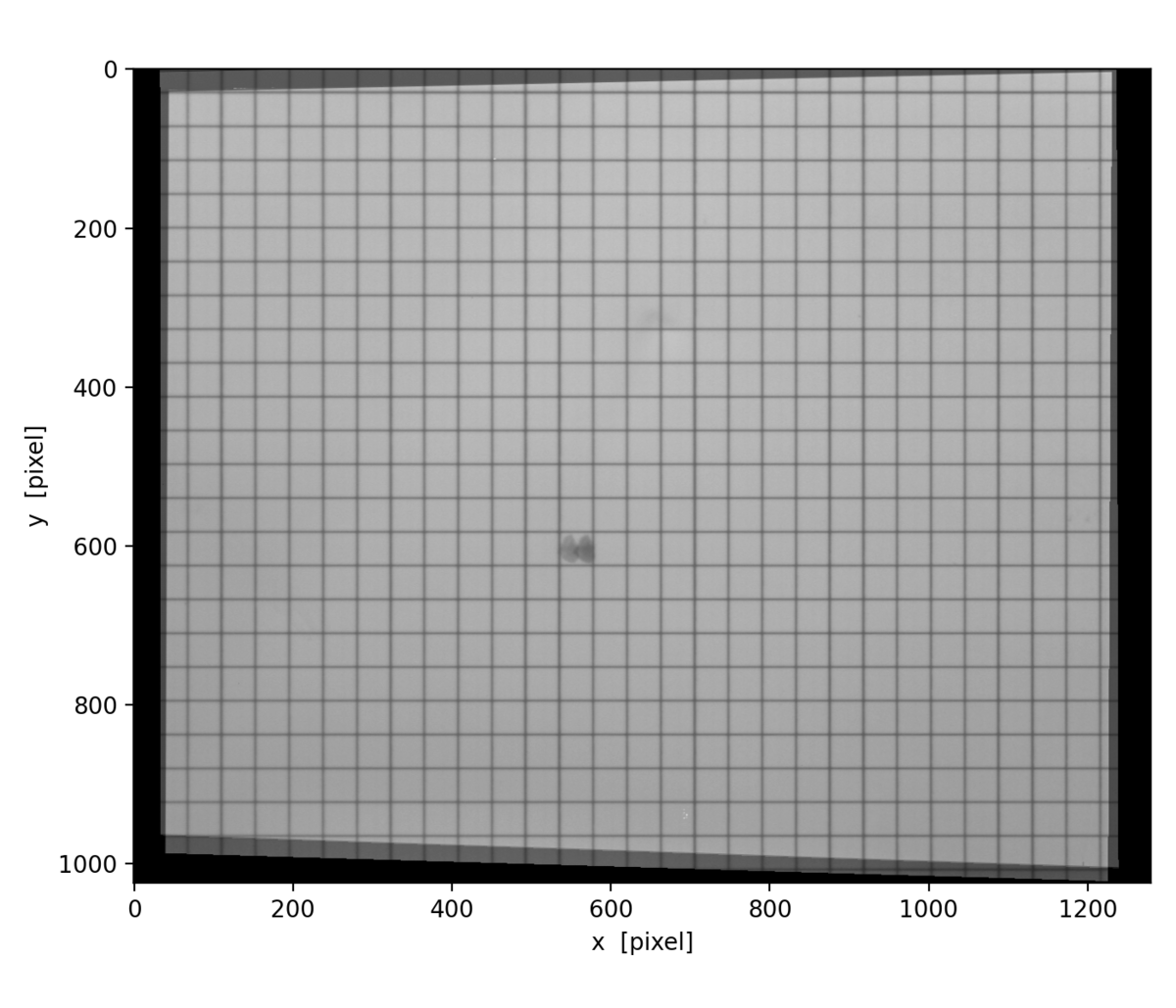



Prior to PIV processing, image back-projection is performed using nonlinear projective mapping as described in Sec. 8.3.1. This is achieved using a set image-to-object correspondence points obtained from a calibration grid placed into the plane of the light sheet.
Using the mapping the images are projected onto the coordinate system of the calibration target. Since the target is never perfectly aligned (co-planar) with the light sheet a slight misalignment will be present. By cross-correlation between the back-projected PIV recordings of the two views, this misalignment can be quantified and corrected for by adjusting the mapping of the back-projection.
The package provided below contains Python scripts illustrating the mapping and back-projection procedure in more detail. The scripts can be used to perform the back-projection on the supplied image data and can be a guidance to perform stereo-PIV processing including disparity correction.
-
ZIP archive with raw PIV images, calibration data and sample Python scripts for image-back-projection
Content provided by C. Willert (DLR), 2024-02-27